
Калибровка камеры
Калибровка камеры это расчет внутренних параметров камеры для корректного определения размеров на местности. Внутренние параметры это фокусное расстояние, положение центральной оси и коэффициенты дисторсии.
Для калибровки сделайте съемку какого-нибудь пестрого объекта, например обеденного стола, со множества ракурсов и с взаимным перекрытием снимков не менее 70%. Количество снимков должно быть около 30-40. Например
New 2026 Fotomer Mono
Далее будем использовать бесплатную программу 3DF Zephyr Free
https://www.3dflow.net/3df-zephyr-free/ страница программы 3DF Zephyr Free
https://www.3dflow.net/download/3df-zephyr-free-worldwide/ загрузка бесплатной программы
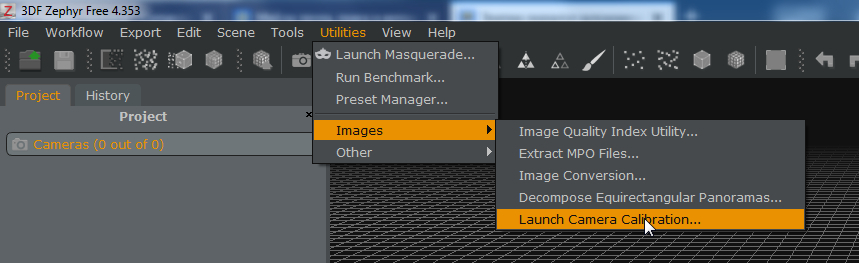
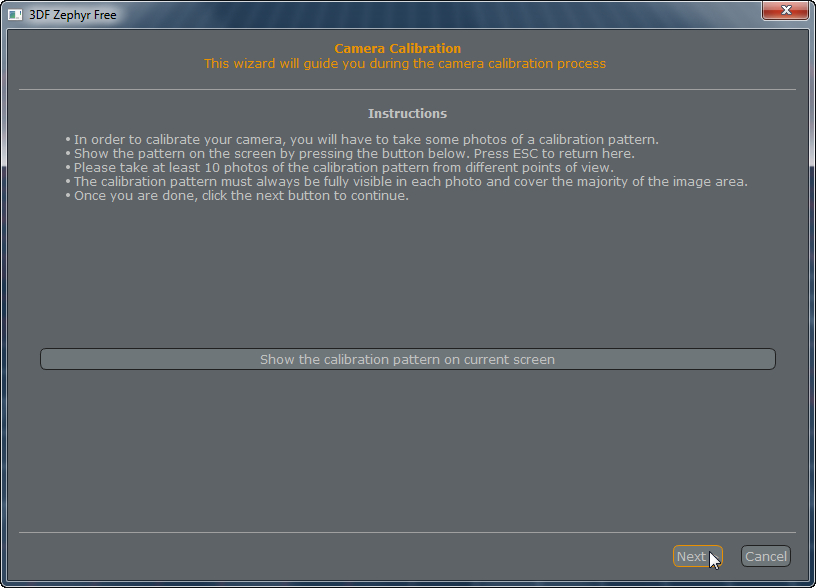
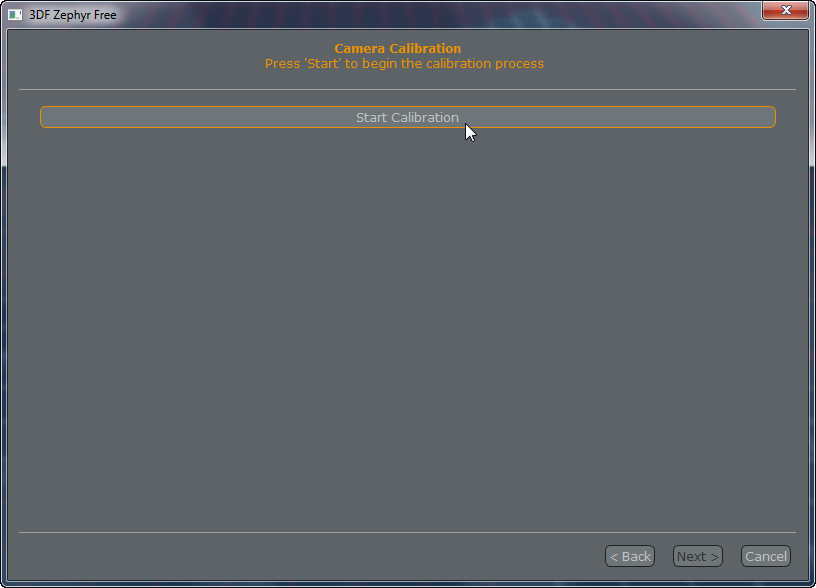
После установки программы запустите калибровку камеры.
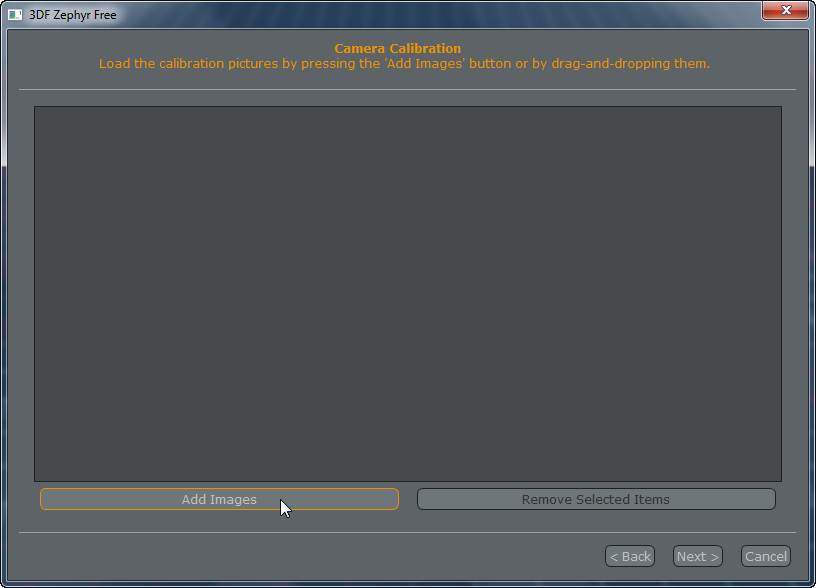
Загрузите отснятые изображения
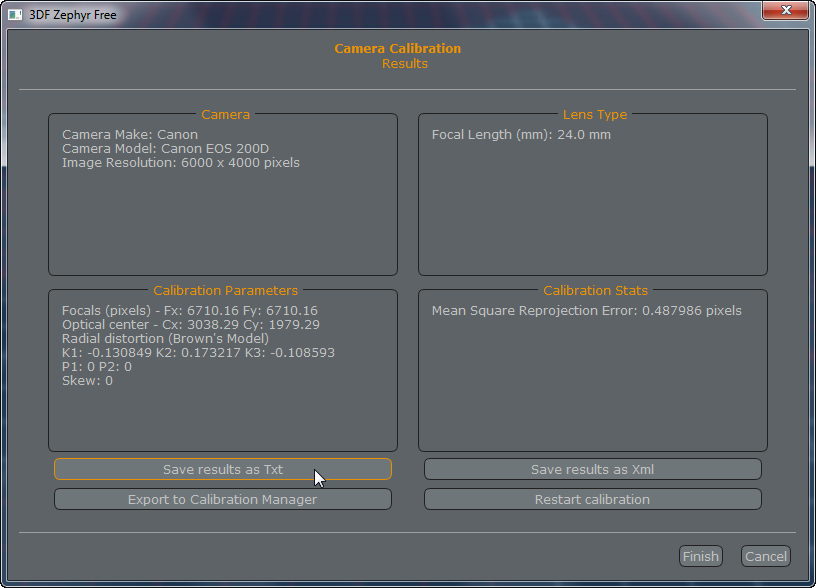
И запустите процесс калибровки
Сохраните результат в текстовом формате
В программе Квадрат выберите пункт меню "Калибровка" -> "Новая камера", загрузите XML или TXT файл калибровки и нажмите кнопку "Добавить камеру".
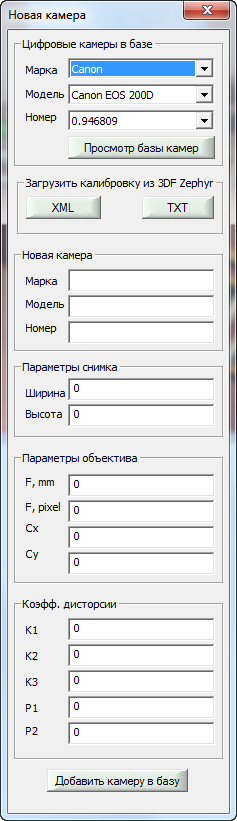
Также все параметры можно ввести вручную использовав другой тип калибровки, например по шахматной доске.
https://docs.mrpt.org/reference/latest/app_camera-calib.html
страница загрузки https://github.com/MRPT/mrpt/releases/tag/Windows-nightly-builds
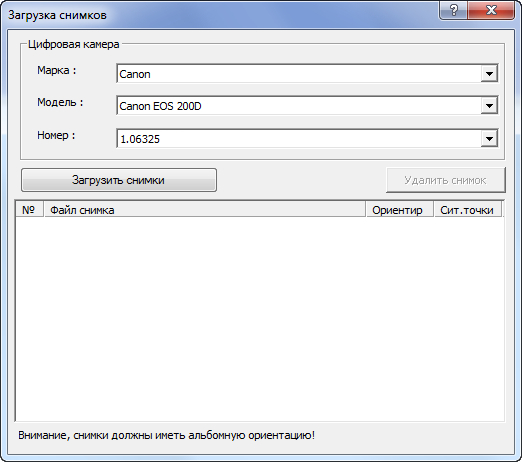
Далее при загрузке снимков выберите добавленную камеру
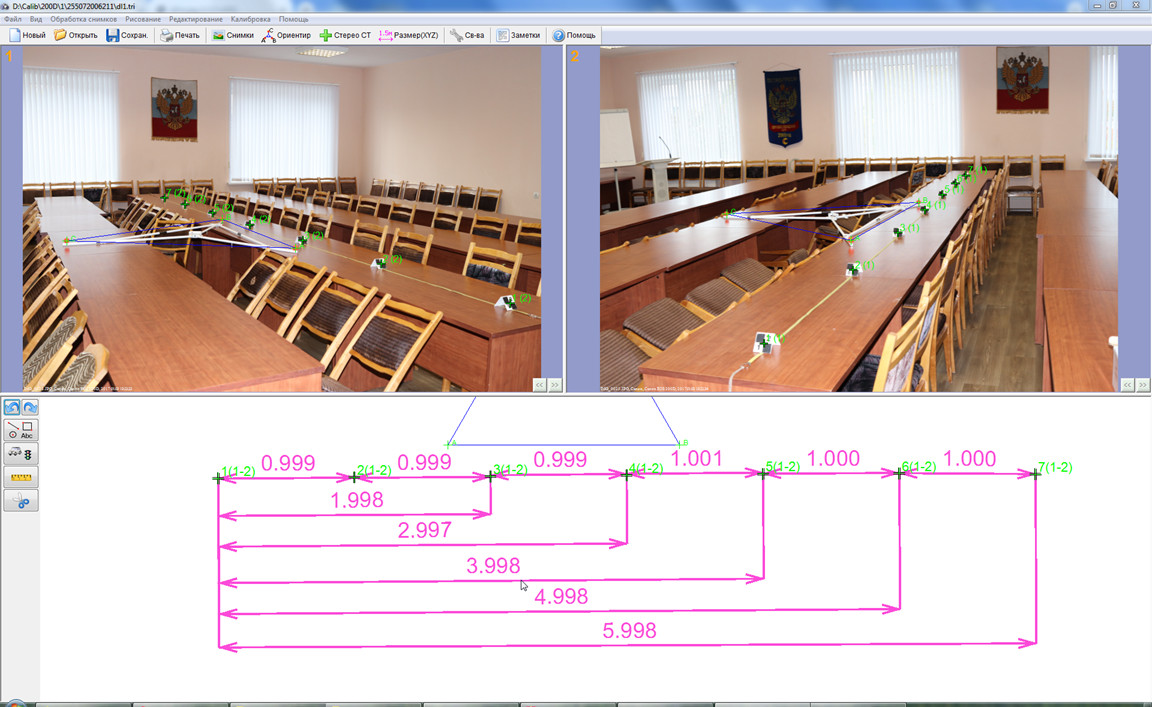
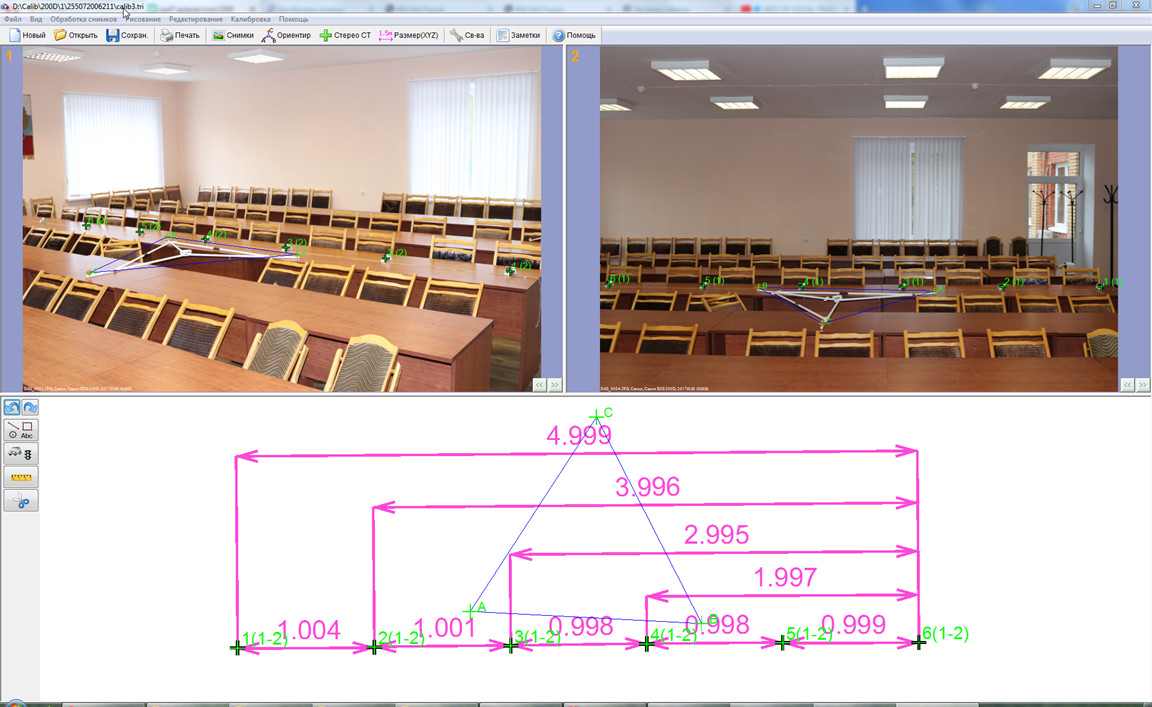
Автоматическую калибровку иногда можно улучшить. Для этого можно использовать объекты с известными размерами.
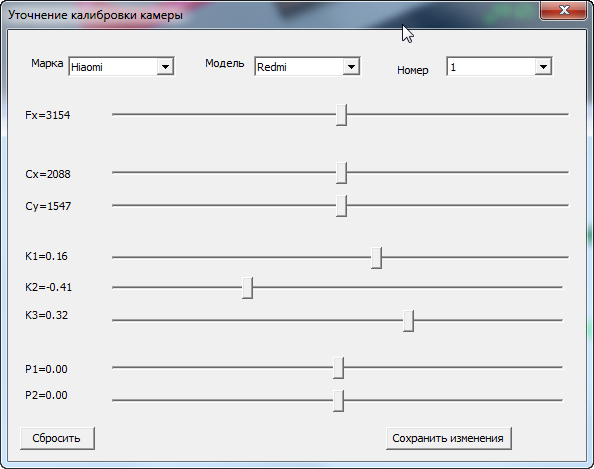
Сделайте стереопару и укажите известные размеры. Далее "Калибровка" -> "Уточнение калибровки " и двигая ползунки добейтесь истинности размеров и нажмите "Сохранить изменения". F - фокус в миллиметрах. Cx, Cy - положение оптической оси объектива в пикселях относительно верхнего левого угла, обычно равно половине значения ширины и высоты. K1, K2, K3 - коэффициенты радиальной дисторсии. P1, P2 коэффициенты тангенциальной дисторсии.

Скачать пример см. программа Fotomer
Этот адрес электронной почты защищён от спам-ботов. У вас должен быть включен JavaScript для просмотра.