Fotomer Mono описание
При первом запуске программы может потребоваться время т.к. Python интерпретатор собирает зависимости.
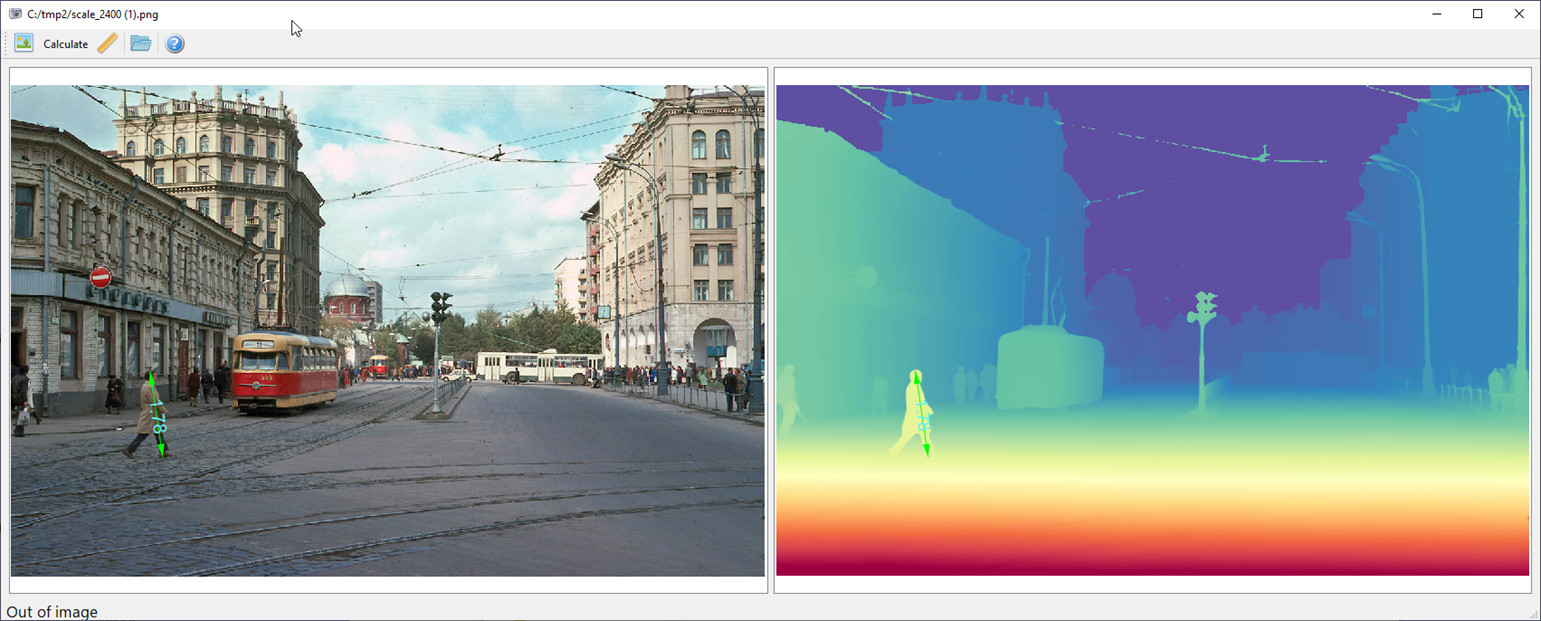
Интерфейс программы

 - загрузить изображение, также программа поддерживает Drag And Drop, можно просто перетащить изображение на окно программы. Внимание, программа в данный момент не поддерживает русские буквы в названии пути в Windows.
- загрузить изображение, также программа поддерживает Drag And Drop, можно просто перетащить изображение на окно программы. Внимание, программа в данный момент не поддерживает русские буквы в названии пути в Windows.
 - расчет карты глубины и 3D модели в формате PLY. Данные сохраняются в папку рядом с изображением, папка имеет такое же имя.
- расчет карты глубины и 3D модели в формате PLY. Данные сохраняются в папку рядом с изображением, папка имеет такое же имя.
 - установка размерной линии.
- установка размерной линии.
 - открыть папку с результатами расчета.
- открыть папку с результатами расчета.
 - сохранить левое и правое изображение вместе с размерными линиями. Не доступно в Demo версии.
- сохранить левое и правое изображение вместе с размерными линиями. Не доступно в Demo версии.
 - справка.
- справка.
Управление:
Средняя клавиша мыши - перетаскивание изображения и Zoom.
Правая клавиша мыши - Fit To Window подогнать изображение под размер окна.
Клавиши + - - увеличить или уменьшить размер текста размерной линии.
Клавиша Ctrl-S - сохранить проект.
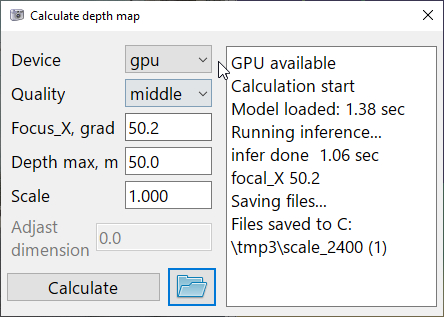
Device - выбор устройства для запуска модели CPU или GPU. На CPU расчет идет медленнее и желательно выбирать Quality качество модели middle или small. Также для ускорения расчета можно предварительно уменьшить размер изображения.
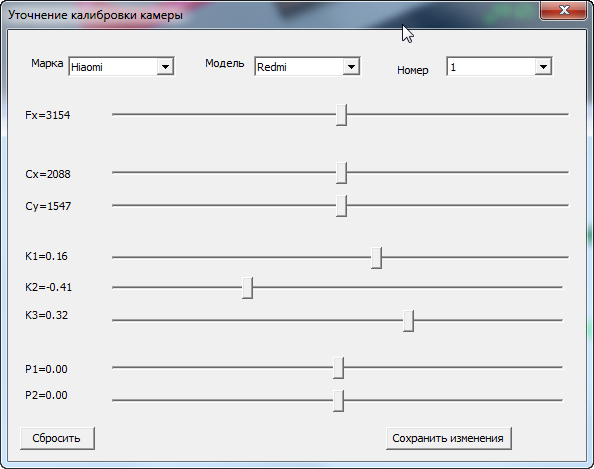
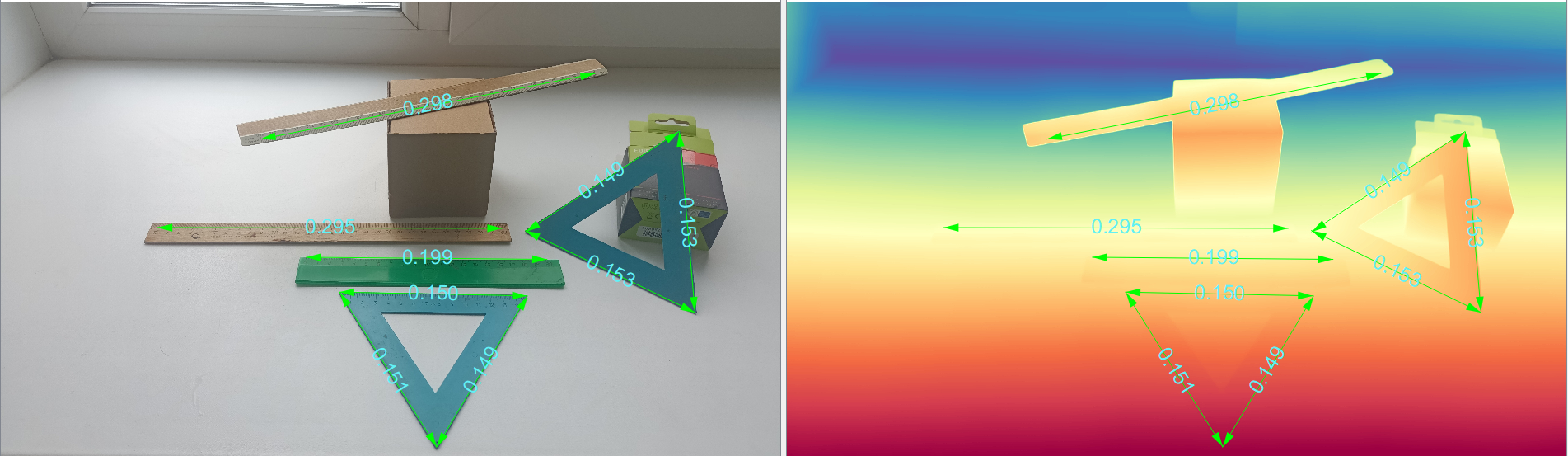
Focus_X - это угол поля зрения камеры по оси X в градусах, при первом расчете программа сама его рассчитывает, далее его можно корректировать для уточнения размеров.
Depth max - это глубина 3D модели в метрах от объектива камеры по оси Z, чтобы убрать лишнюю информацию можно поставить меньшее значение.
Scale - при расчете масштаб модели оценивается приблизительно, если на снимке известен один линейный размер, можно уточнить масштаб при помощи Adjast Dimension.
Adjast dimension - уточнение размера и масштаба по известному линейному размеру.
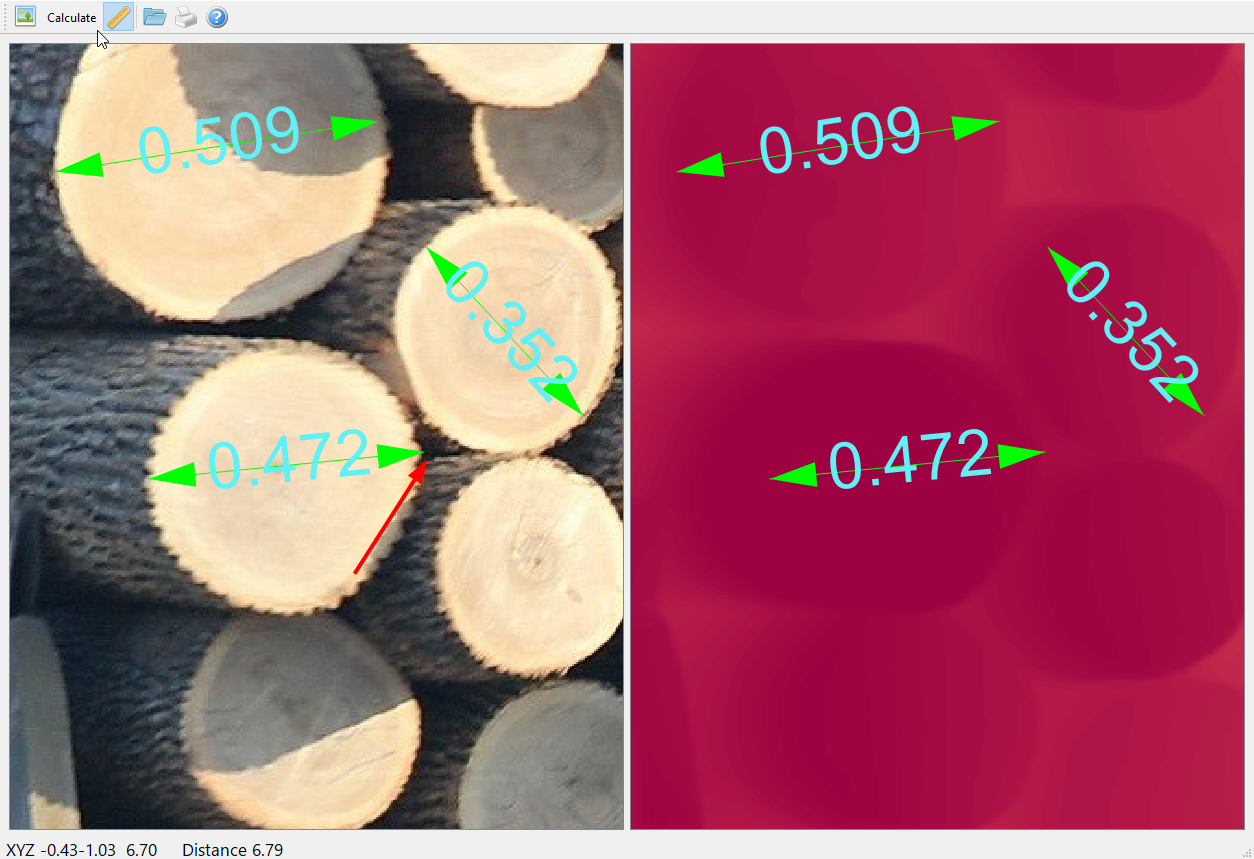
При указании размерной линии важно указывать размер в границах объекта, например диаметр бревна 0.405, но стоит чуть вынести размерную линия за габарит бревна, как он резко увеличивается до 0.472. Также это можно отследить в Status Bar, когда параметр Distance резко увеличивается.
Для удаления размерной линии нажмите на ее текст и клавишу Del.

Focus_X - это угол поля зрения камеры по оси X в градусах, при первом расчете программа сама его рассчитывает, далее его можно корректировать для уточнения размеров.
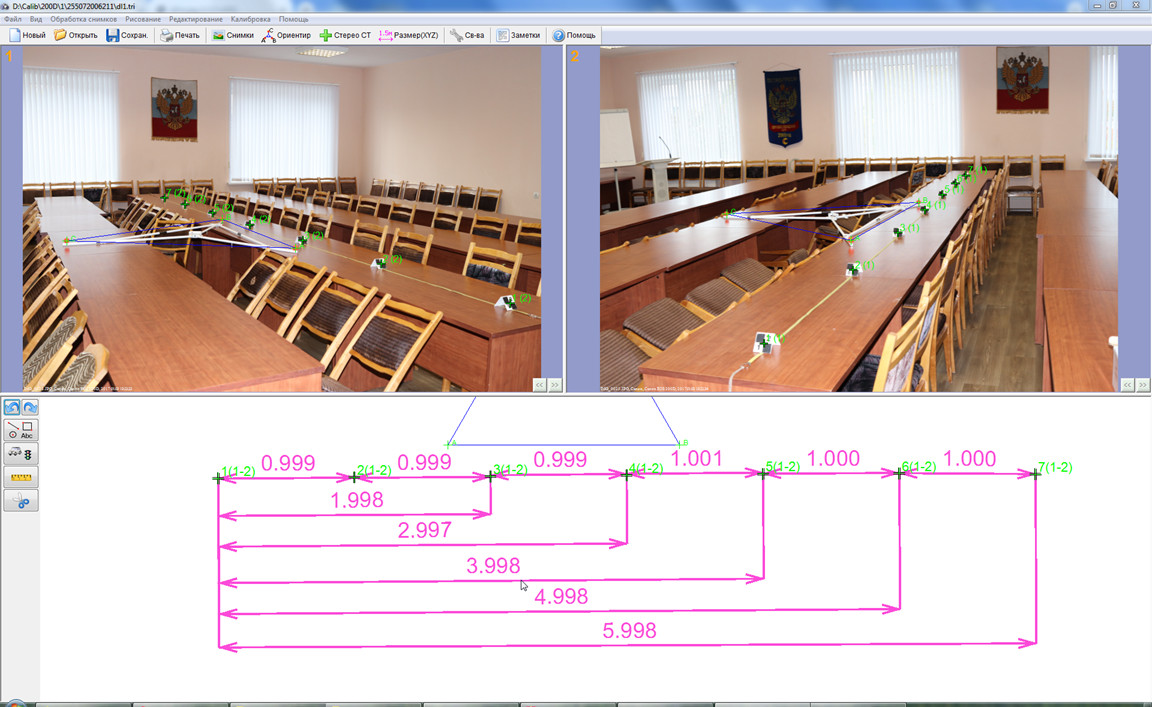
Например для данного изображения автоматически был рассчитан угол в 65 градусов, но наиболее корректные размеры получаются для Fov_X 50 градусов. Размер линеек 300мм, 200мм и сторона треугольника 150мм.
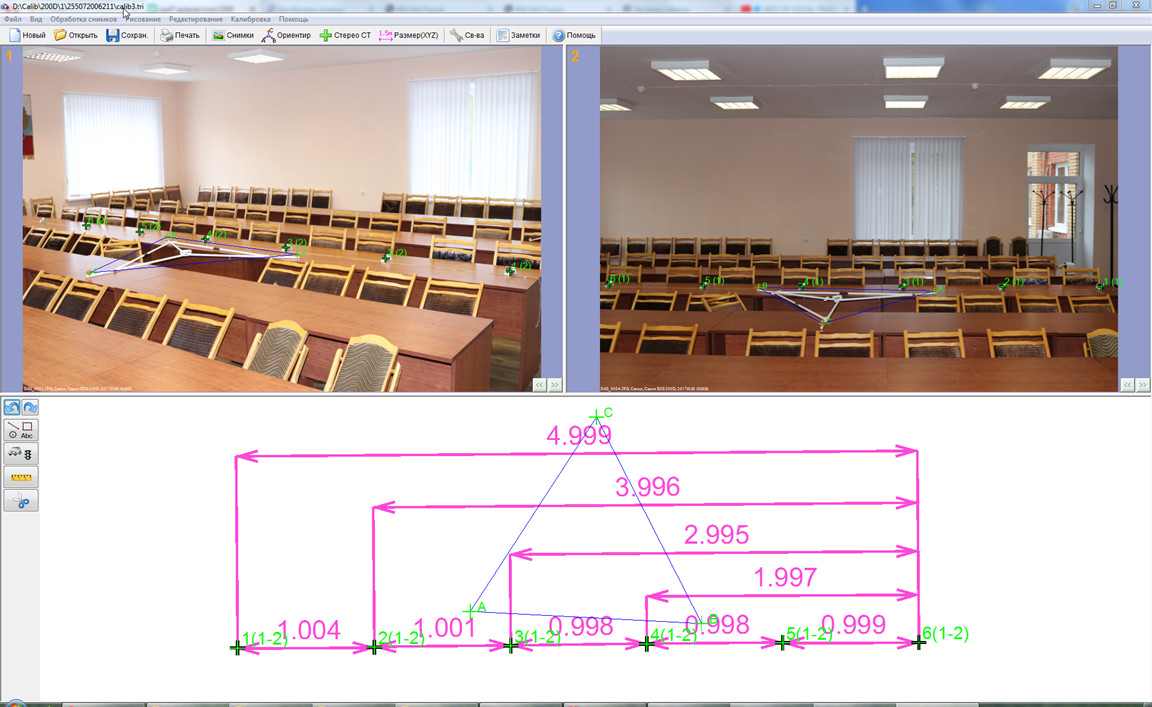
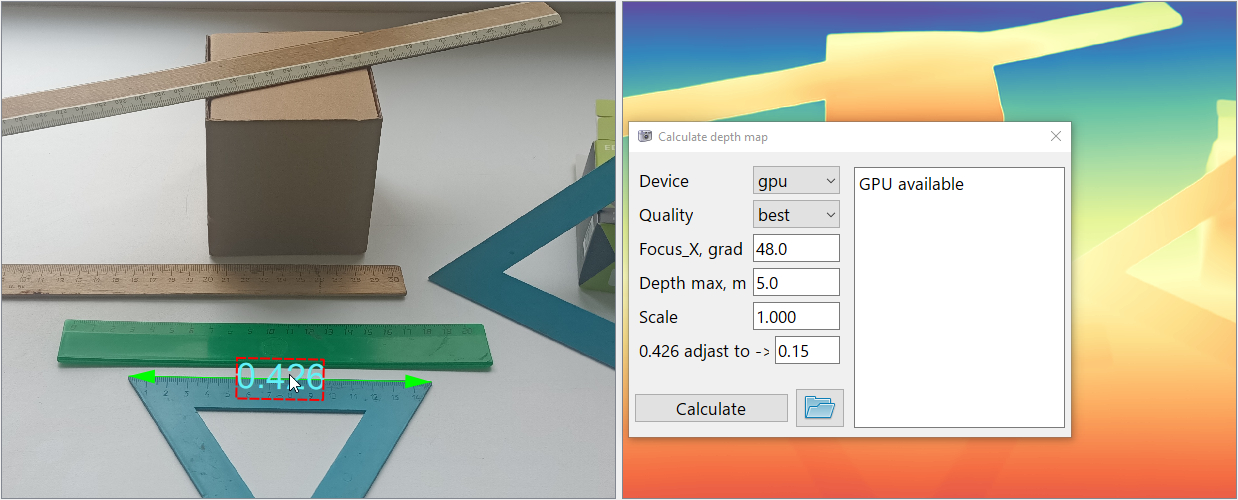
Adjast dimension - уточнение размера и масштаба по известному линейному размеру.
Если известен линейный размер (в данном случае 0.15 сторона треугольника), в режиме "Calculate" укажите нужный размер на снимке, введите в поле "Adjast to" требуемый размер и нажмите кнопку "Calculate", модель буде пересчитана. Также 3D модель PLY сохранится в данном масштабе и на ней можно производить измерения.
PLY формат
Бесплатная программа для просмотра и редактирования 3D моделей https://www.cloudcompare.org/
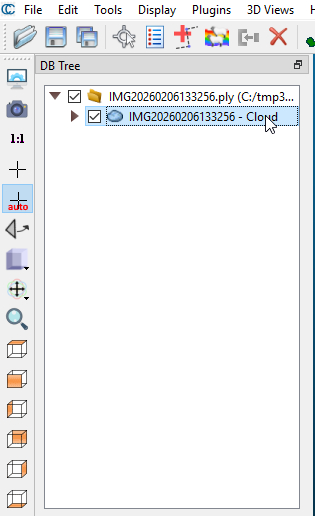
Интерфейс программы CloudCompare
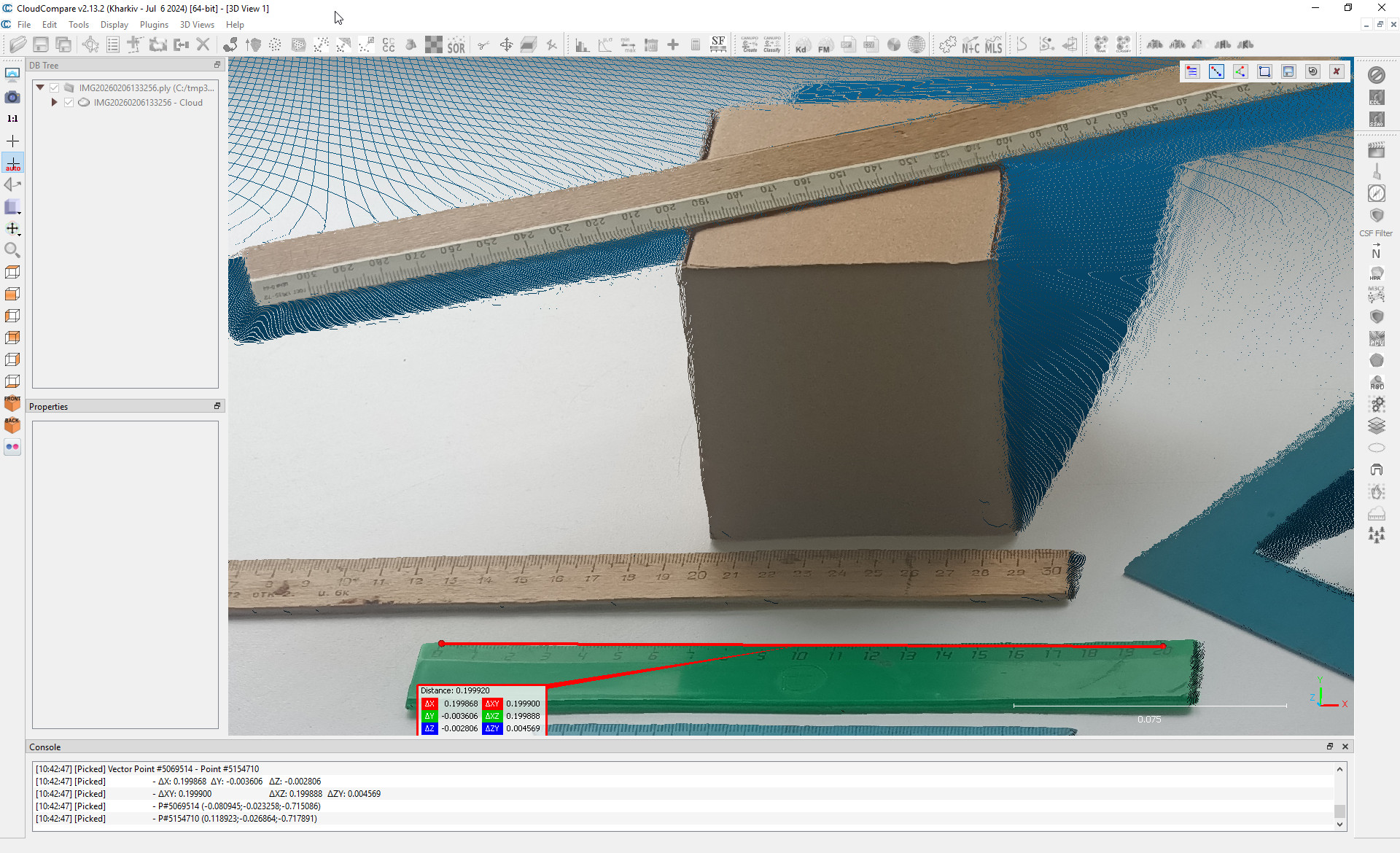
Если в FotomerMono был указан масштаб, то на 3D модели в CloudCompare можно производить измерения в натуральную величину.
В левом окне Db Tree нажмите на название облака
 далее нажмите в меню "Point picking"
далее нажмите в меню "Point picking"
 справа появится меню, в котором нажмите указанную кнопку. И далее на 3D виде укажите 2 точки.
справа появится меню, в котором нажмите указанную кнопку. И далее на 3D виде укажите 2 точки.
Другие применения программы
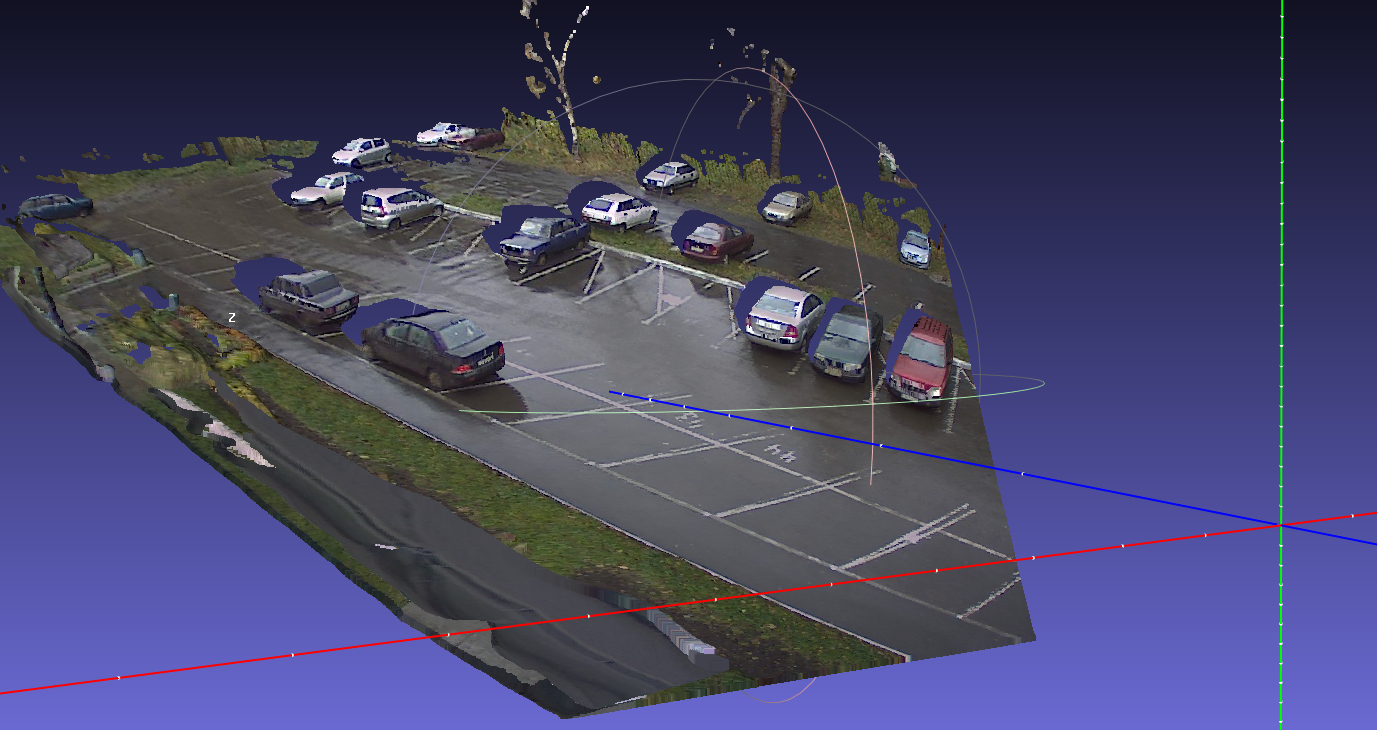
Иногда в задачах видео-наблюдения требуется знать уравнение плоскости движения объектов для более точного трекинга, например плоскость парковки для точного определения координат объектов с одной камеры без сложных вычислений. Определить плоскость по 3D модели можно в сторонних программах, в следующей версии Fotomer Mono будет реализовано определение плоскостей.

Этот адрес электронной почты защищён от спам-ботов. У вас должен быть включен JavaScript для просмотра.